

Our Objectives
LunarLeaper is a robotic mission concept designed to access and explore lunar lava tubes, using agile legged mobility to overcome hazardous terrain and enable in-depth investigation of these subsurface environments.

Investigate subsurface lava tubes
Confirm the existence and assess the extent of subsurface voids.

Assess the suitability of lava tubes for human exploration and habitation
Determine why collapse occurred and whether further collapse is likely. Assess availability of in-situ resources (ISRs). Determine the accessibility of the pit edge with potential future large robotic systems.

Assess geological processes, with a focus on the volcanic evolution of the Moon
Study key aspects of lunar volcanism exposed along the pit wall. Determine the number of flows, their volume, nature and their timescales. Paleoregolith layers might be present and could hold traces from the early Sun and Earth’s atmosphere. Connect local to more regional observations.

Investigate the local and regional extent of the regolith
Determine lateral and vertical extent of regolith. Assess properties of lunar regolith, including its composition, structure, and mechanical behavior, directly linked to mission design, landing safety, mobility, and the feasibility of in-situ resource utilization (ISRU) for future lunar exploration.

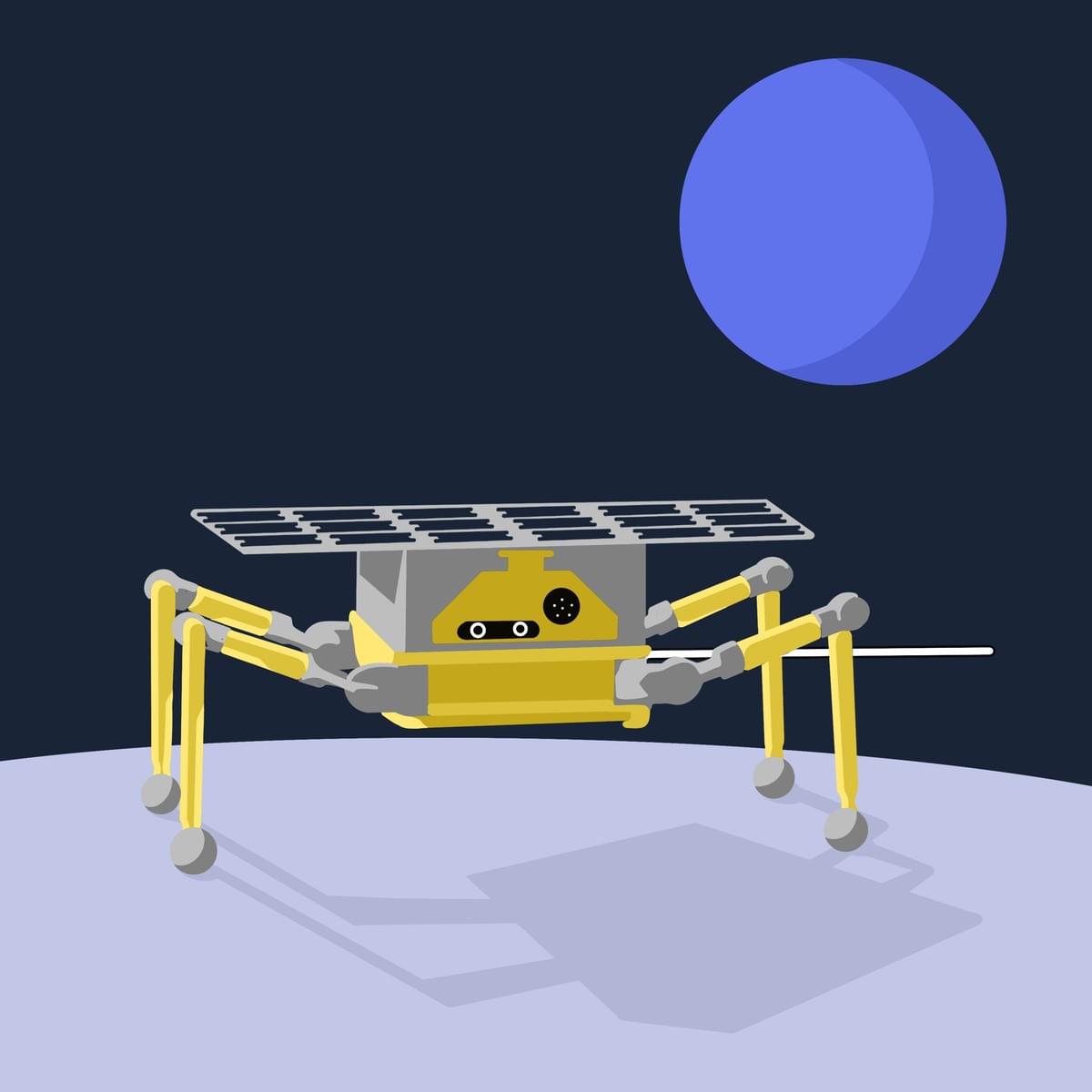
Operate a legged robot on the Moon
Employing and operating the first legged robot on an extraterrestrial surface, demonstrating new technological opportunities on the Moon and beyond.
Concept

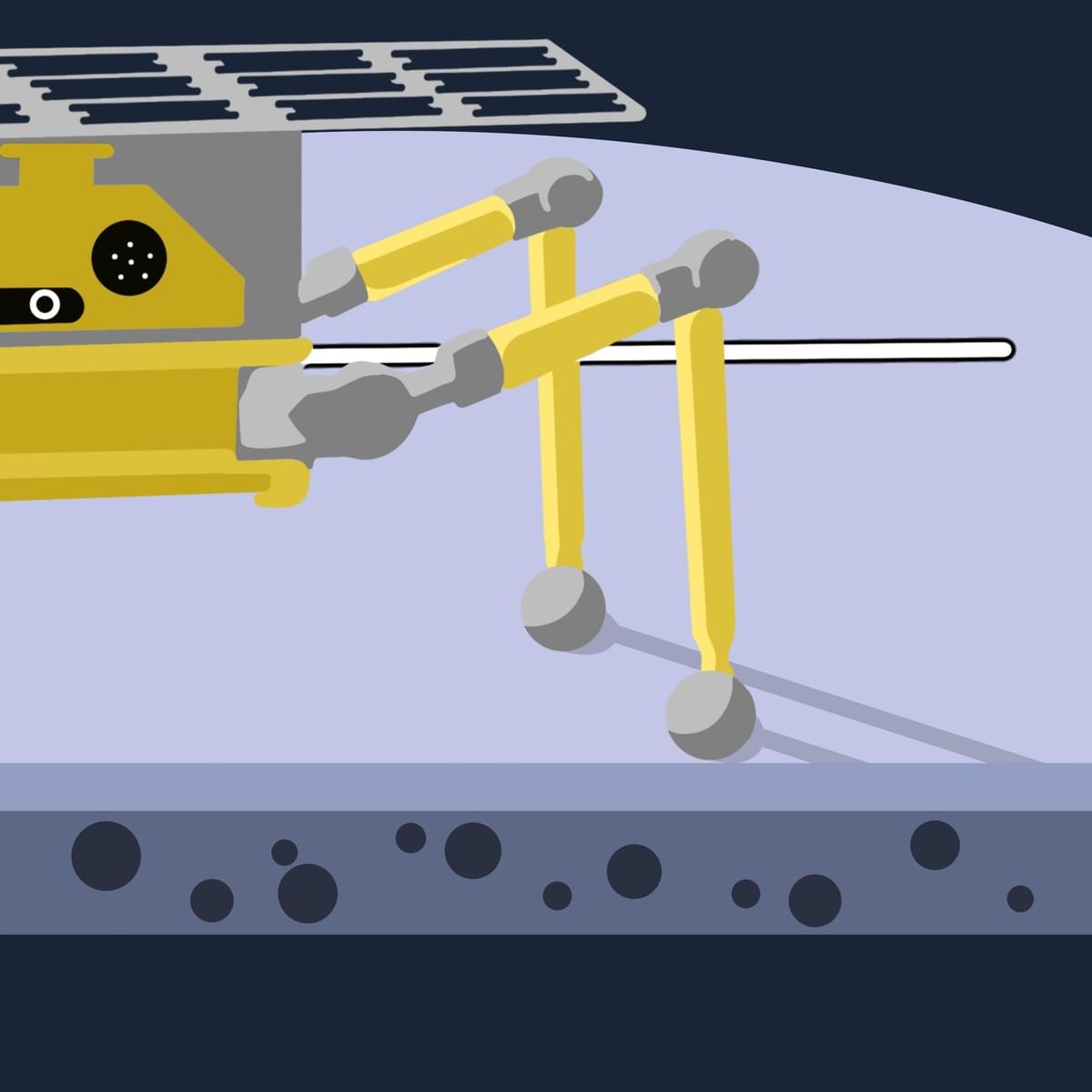
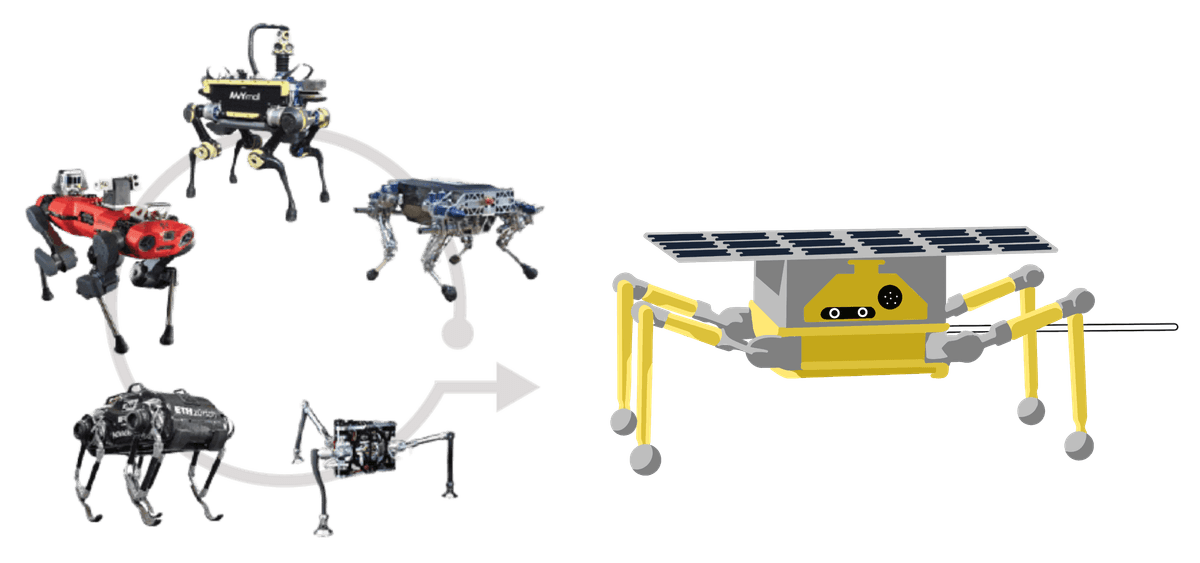
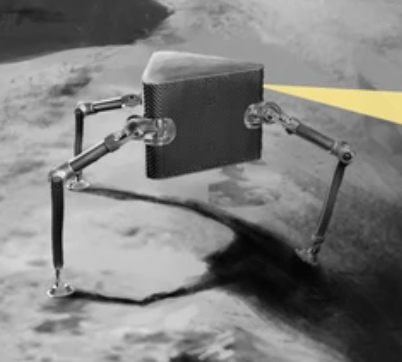
Mobility
LunarLeaper is based on the SpaceHopper design, the result of 4 years of iteration at ETH's Robotic Systems Lab (RSL). The robot weighs <15 kg.

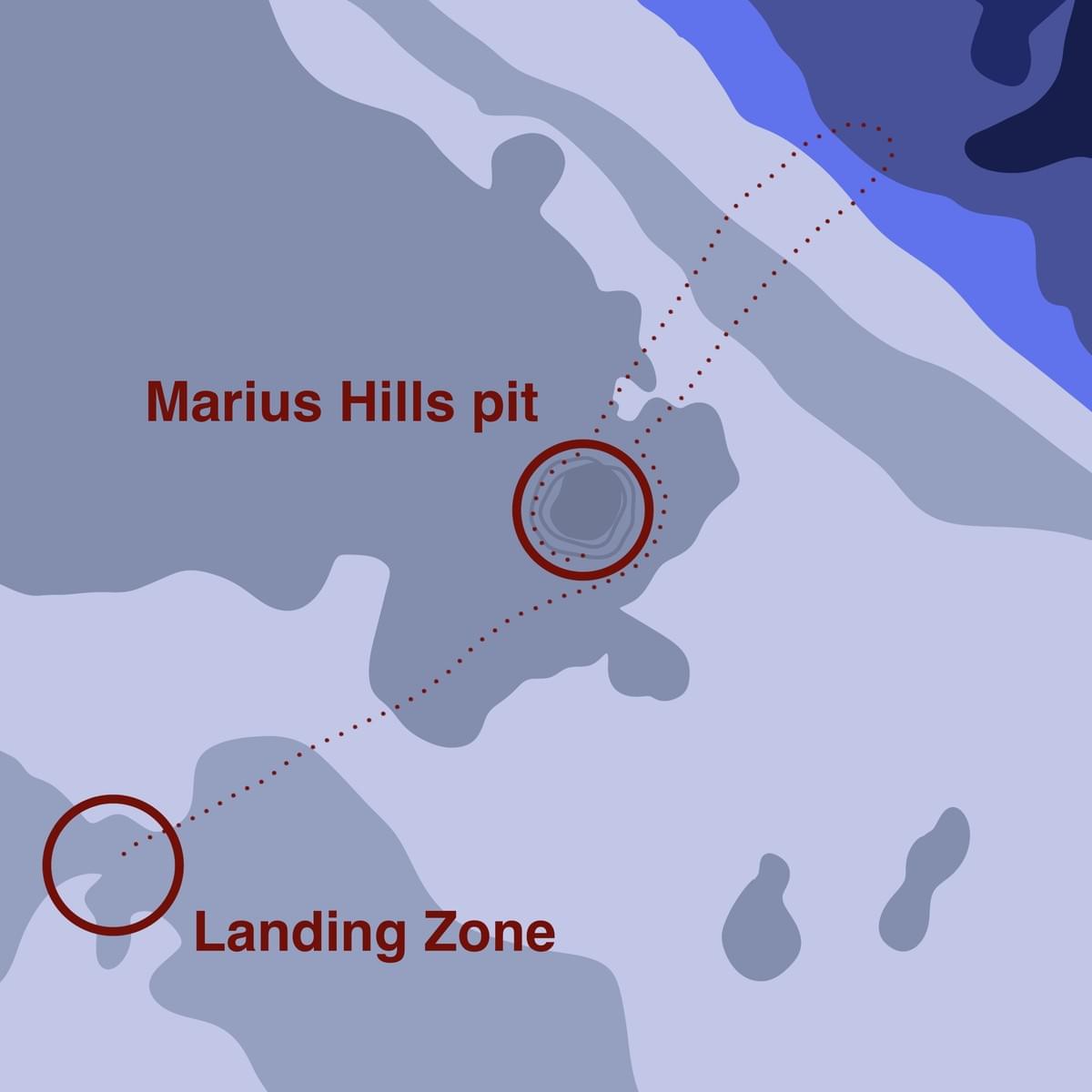
Landing site
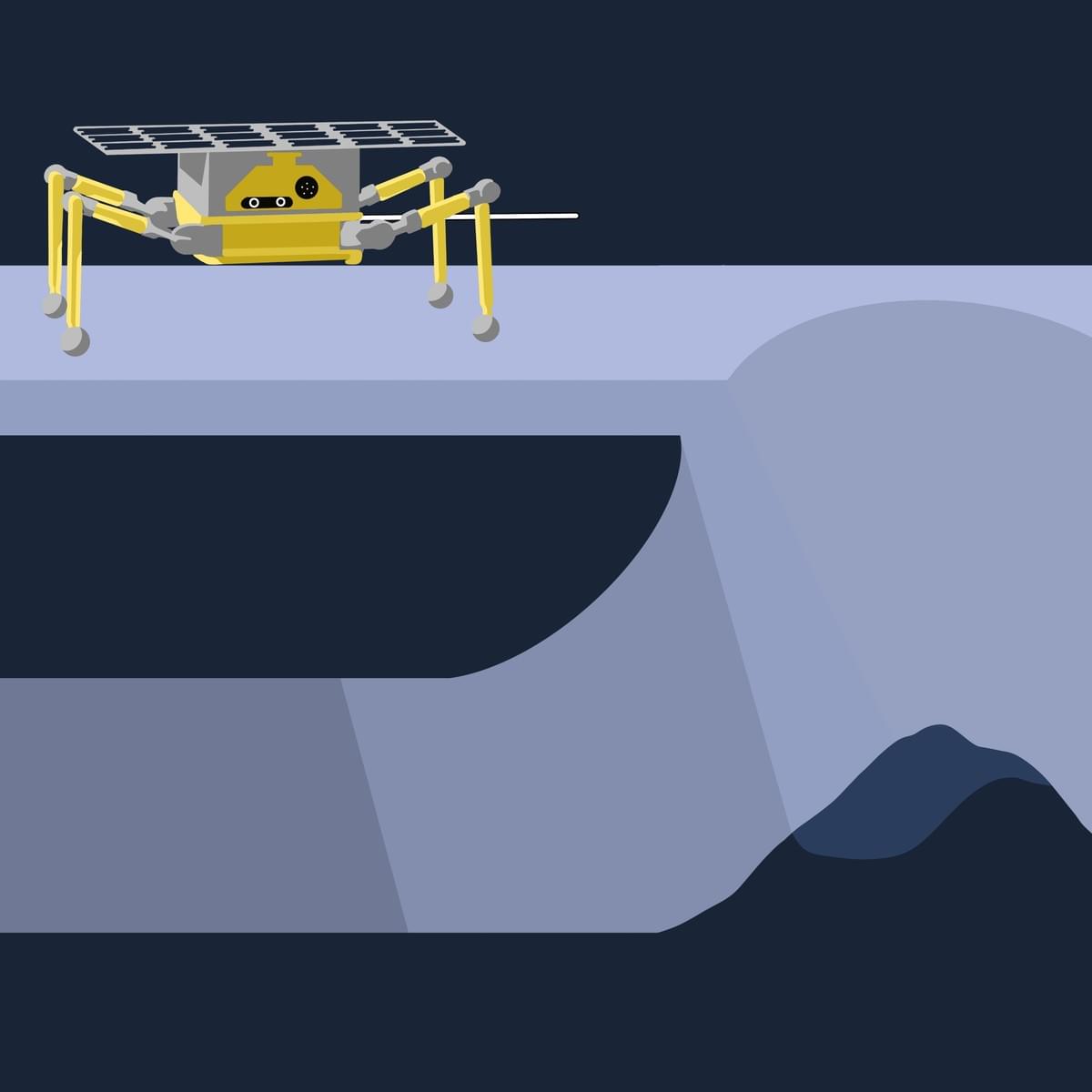
We want to explore the Marius Hills pit on the near side of the moon, a pit that is thought to be connected to a subsurface hollow lava tube.
Our plan is to land outside the hypothesized extent of the lava tube and traverse it twice, while taking some time at the pit itself.

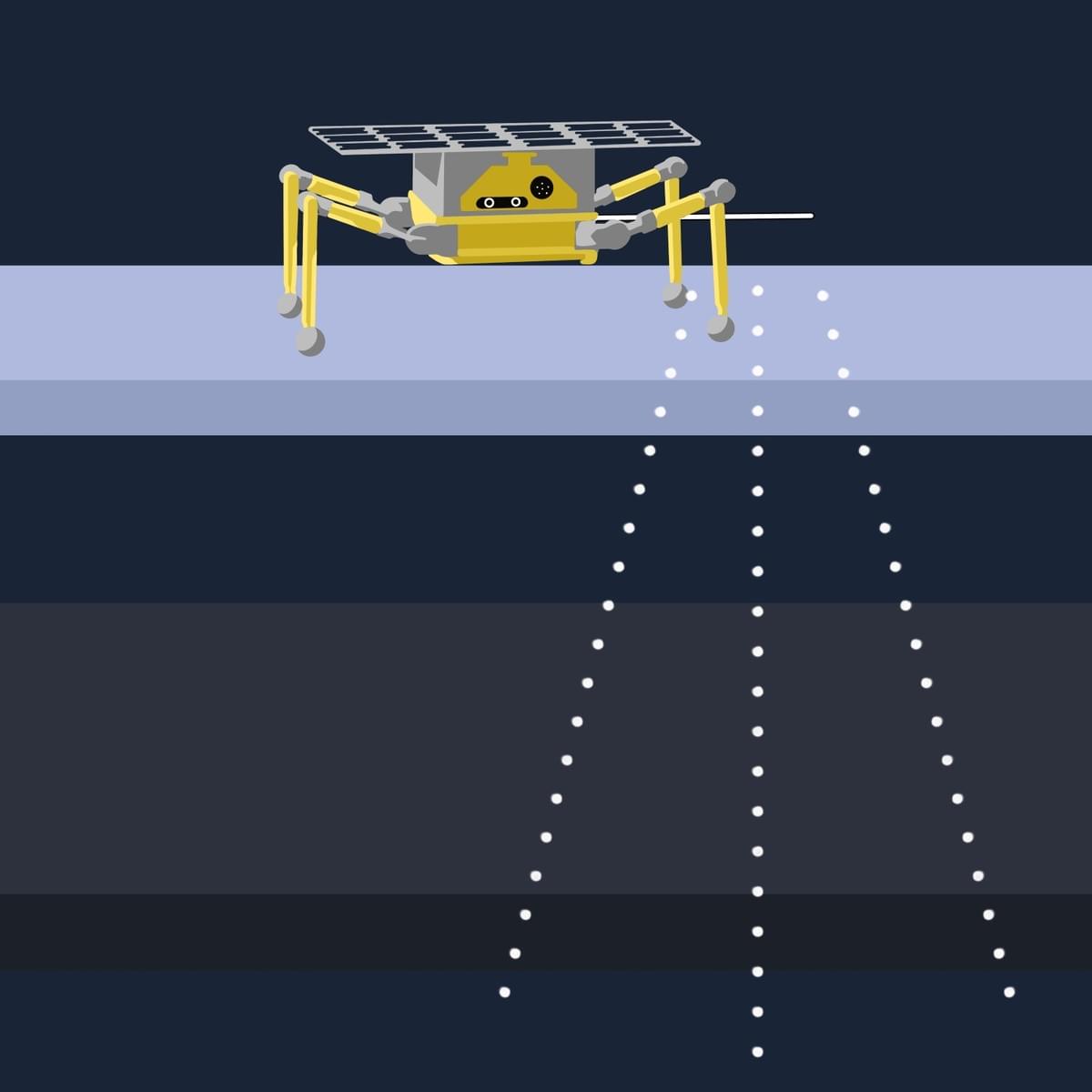
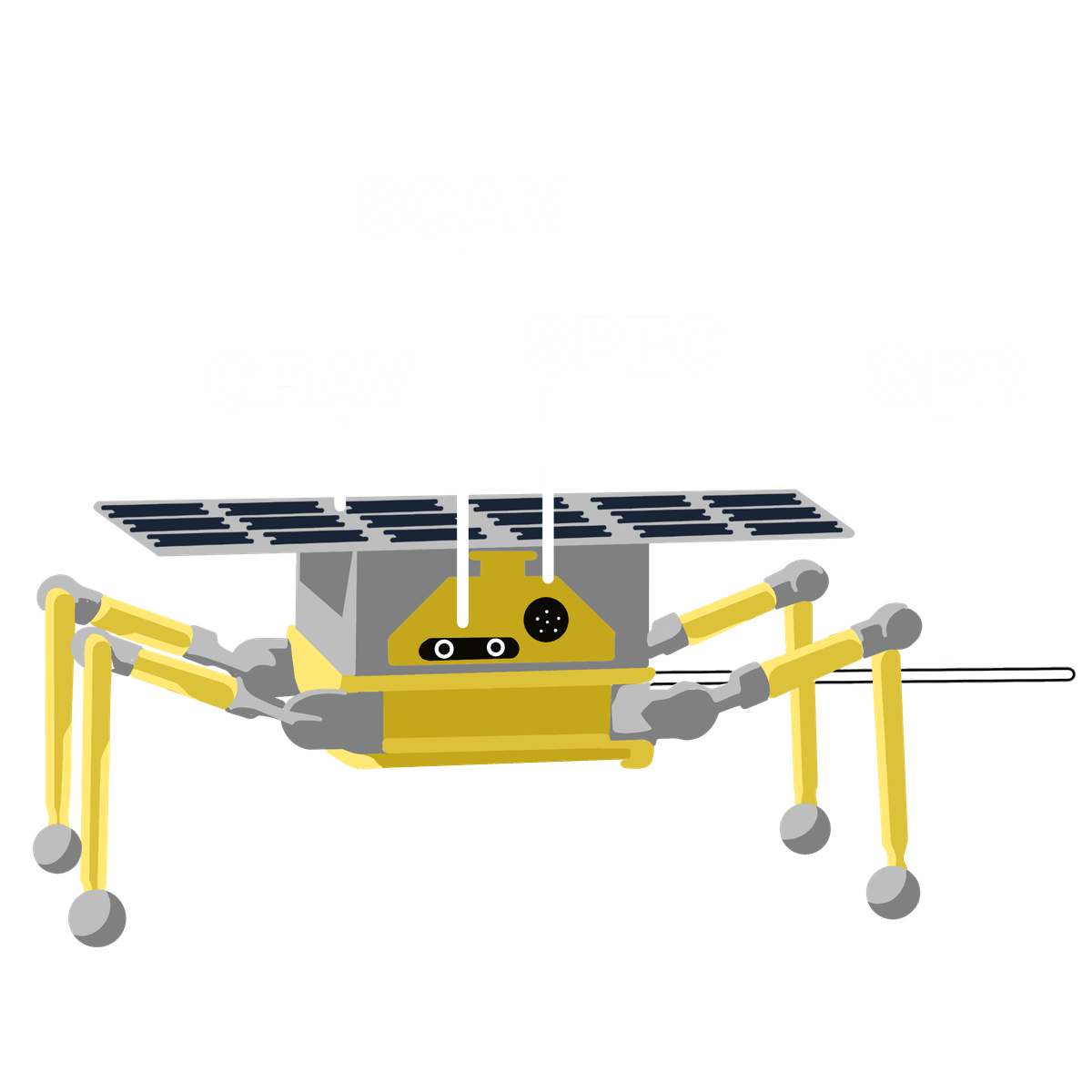
Instruments
We combine geophysical measurements from the surface with imaging from the pit rim. The geophysical instruments are a gravimeter (GRAV) and a ground penetrating radar (GPR). For the imaging we use our dedicated science camera (SCAM) and hopefully a spectrometer (SPEC). The legs of the rover can be used to to dig in the lunar soil to estimate mechanical properties.
Articles
Click on the images below to read more




Team

Dr. Anna Mittelholz
Principal Investigator

Dr. Simon Stähler
Deputy Principal Investigator

Judy Lai-Norling
Project Manager

Dr. Hendrik Kolvenbach
Lead Robotics

Aurélie Cocheril
Space System Engineer
Joe Church
Robotics Engineer
Philip Arm
Robot Control Engineer

Adrian Fuhrer
Space Robotics Engineer

Elena Krasnova
Thermal / Robotics Hardware Engineer

Dr. Svein-Erik Hamran
Lead Ground-Penetrating-Radar

Dr. Matthias Grott
Lead Infrared Spectrometer

Dr. Ozgur Karatekin
Lead Gravimetry

Michael Gschweitl
Space System Engineer

Dr. Valentin Bickel
Geology Lead
Mentors

Prof. Domenico
Giardini
Co-PI of the NASA InSight mission
Co-PI of the ESA LISA mission

Prof. Thomas
Zurbuchen
Former Associate Administrator of the NASA Science Mission Directorate

Prof. Marco
Hutter
Expert in legged robotic systems

Prof. Miguel
Olivares-Mendez
Director of the Space Science Master in Luxembourg, expertise in robotic systems

Prof. Nicolas
Thomas
Developed optical instruments for multiple ESA missions (Mars Express, TGO, BepiColombo)
Contact Person
Dr. Anna Mittelholz - anna.mittelholz@eaps.ethz.ch